
EV3ControllAR - Control Robots via the Microsoft HoloLens
Our near future creates a need for more natural interactions with robots, such as gestures and voice commands which are still difficult topics to handle in the industry. That’s why we decided to face this challenge at our holodeck.

Interacting with robots should fit the general terms of human computer interaction standards:
- tolerance in failure
- fallbacks for actions
- support the user understanding the controls
- help and documentation
- aesthetic and minimalist design
- consistency and standards
- error prevention
- match between system and the real world
You can reread these heuristics here. The controls of the Microsoft HoloLens might not fit those needs so far, however I jumped into Unity and designed an application for my bachelor’s degree.
Idea
I asked myself: How will humans and robots work together in the near future? Will there be touchpads and control sticks like today or will the way of interacting change completely due to the rise of emerging technologies? Above all, will humans be able to adapt this new way of interacting with machines?
To find answers, I decided to create a prototype and test the application with users in a thinkaloud test.
Tools
Unity
A great game engine any dev knows and the tool of choice when creating applications for the HoloLens. (Haha, it is the only tool so far!)
MonoBrick Communication Library
The MonoBrick communication library is a LEGO Mindstorms communication library written in C# that works with the standard firmware on both the EV3 and NXT. MonoBrick communication library runs on a wide variety of operating systems including Linux, Mac OS and Windows. The library can communicate with the brick using either USB, Bluetooth or WiFi(only EV3).
LEGO Mindstorms EV3
The LEGO Mindstorms series of kits contain software and hardware to create customizable, programmable robots. They include an intelligent brick computer that controls the system, a set of modular sensors and motors, and LEGO parts from the Technic line to create the mechanical systems.
In my case it was the substitution for a big industry machine.
Setup
- First setup your Unity so you can create and build projects for the Microsoft HoloLens
- You can find all the information needed here
- Then download and import the MonoBrick Communication Library into your Unity projects
- Create a augmented interface for your robot
- Jump into code and assemble all parts:
Design and information flow
Think about how the information flows in the application before jumping into the code.
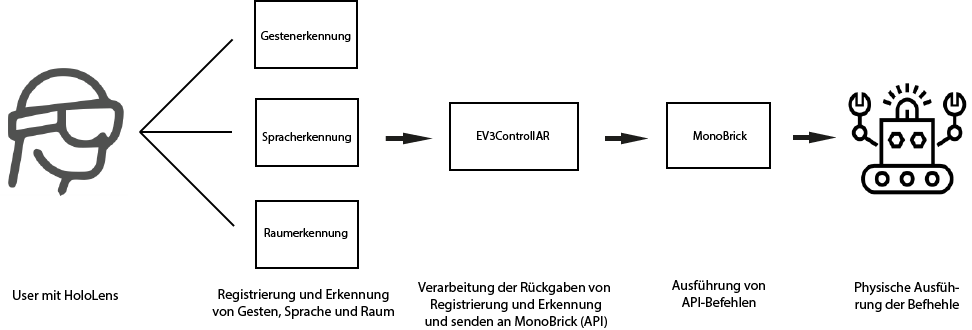
How should the UI look and what needs to be shown in AR?
Create the UI from the wireframe.
Next, jump into the code and try to build an app based on the information flow.
Implementation
- Handle the voice and gesture inputs from the HoloLens
HandsManager.cs
- Detect hands and sources pressed
1 [...]
2 InteractionManager.SourceDetected += InteractionManager_SourceDetected;
11 [...]
12 private void InteractionManager_SourceDetected(InteractionSourceState hand) {
13 HandDetected = true;
14 }
GestureManager.cs
- Define which gestures should be recognized
1 /// Instantiate the NavigationRecognizer.
2 NavigationRecognizer = new GestureRecognizer();
3
4 /// Add Tap and NavigationX GestureSettings to the
/// NavigationRecognizer ’s RecognizableGestures .
5 NavigationRecognizer.SetRecognizableGestures(GestureSettings.Tap | GestureSettings.NavigationX);
GestureAction.cs
- Define what should happend if a gesture is recognized
1 [...]
2 public float TranslationSensitivity = 10.0 f;
3 private float translationFactor ;
4 [...]
5
6 void Update (){
7 PerformTranslation ();
8 }
9
10 private void PerformTranslation () {
11 if(GestureManager.Instance.IsNavigating && HandsManager.Instance.FocusedGameObject == gameObject) {
12 // Calculate translationFactor based on GestureManager ’s NavigationPosition .X and multiply by TranslationSensitivity.
13 // This will help control the amount of translation.
14 translationFactor = GestureManager.Instance.NavigationPosition.x;
15
16 // Restrict the translationFactor to a value between -1 and 1, so the robot doesn ’t get to fast.
17 float clampTranslation = Mathf.Clamp(translationFactor , -1f, 1f);
18 positionManager.SetPosition(clampTranslation / 2 + 0.5f);
19 ev3.MoveRobot((sbyte)( clampTranslation * 10));
20 } else {
21 positionManager.SetPosition (0.5 f);
22 ev3.StopRobot ();
23 }
24 }
VoiceManager.cs
- Recognize voice commands and trigger actions
1 [...]
2 /// Initialize ...
3 KeywordRecognizer keywordRecognizer ;
4 Dictionary <string , System.Action > keywords = new Dictionary<string , System.Action>();
5 [...]
6 /// Create keywords and add them to dictionary ...
7 keywords.Add("grab", () => {
8 ev3.GrabObject();
9 });
10 keywords.Add("place", () => {
11 ev3.PlaceObject();
12 });
13 keywords.Add("stop", () => {
14 ev3.Stop();
15 });
16 [...]
17 /// Tell KeywordRecognizer which words to recognize.
18 keywordRecognizer = new KeywordRecognizer(keywords.Keys.ToArray());
19 /// Register for OnPhraseRecognized event
20 keywordRecognizer.OnPhraseRecognized += KeywordRecognizer_OnPhraseRecognized ;
21 /// Start recognizing ...
22 keywordRecognizer.Start ();
23
24 private void KeywordRecognizer_OnPhraseRecognized(PhraseRecognizedEventArgs args) {
25 Debug.Log("Keyword Recognized ..." + args.text);
26 System.Action keywordAction
27 /// Fire action depending on which keyword was recognized .
28 if(keywords.TryGetValue(args.text , out keywordAction)) {
29 keywordAction.Invoke ();
30 }
31 }
EV3Manager.cs
- Wrap the controls of the robot in a manager so you can call the API from everywhere with defined robot movements
1 using UnityEgine ;
2 using MonoBrick.EV3;
3
4 public class EV3Manager : MonoBehaviour {
5
6 public Brick <TouchSensor, Sensor, Sensor, Sensor> ev3;
7 [...]
8
9 void Start () {
10 ev3 = new Brick<TouchSensor, Sensor, Sensor, Sensor>("WiFi");
11 ev3.Connection.Open();
12 [...]
13 }
14 [...]
15 public void MoveRobot(sbyte speed) {
16 ev3.MotorA.On( speed );
17 }
18 [...]
19 public void GrabObject() {
20 WaitForMotorToStop();
21 ev3.MotorB.Off();
22 WaitForMotorToStop();
23 ev3.MotorC.MoveTo(10, 80, true);
24 WaitForMotorToStop();
25 ev3.MotorB.On(-25);
26 MotorBlocked = true;
27 }
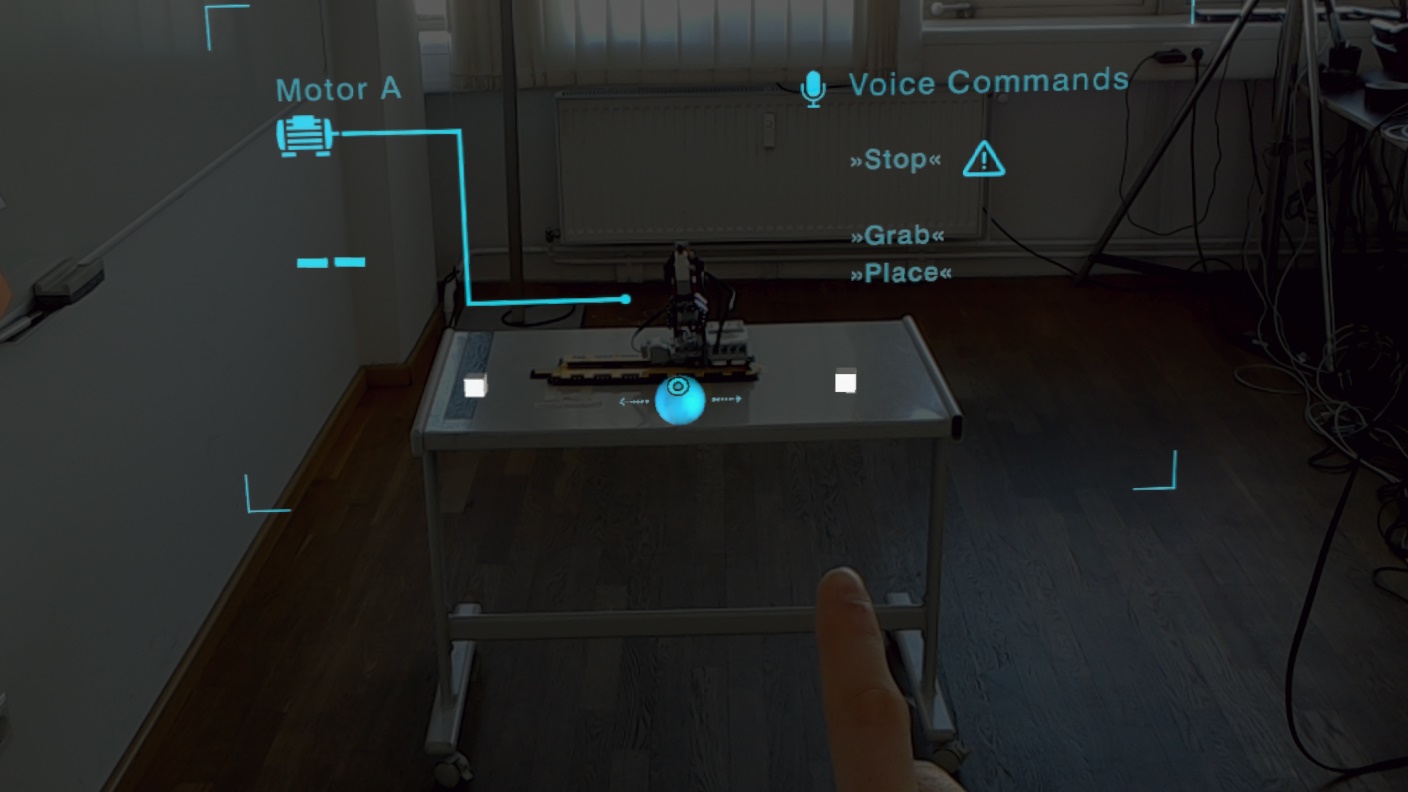
Result
Made with :heart: at ART+COM AG in Berlin.